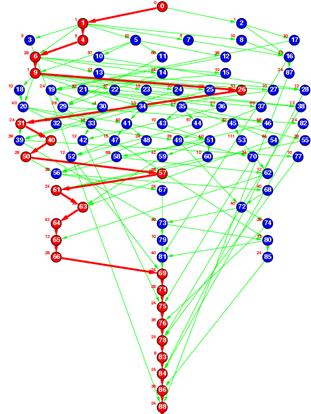
Parallel Task Scheduling
Robot control Graph Image
Source:
Waseda University