My research Projects
Expanding Application of robotic systems using AI methodologies
 Go to My Research CV
Go to My Research CV
As an undergraduate research intern, I began my research career in Artificial Intelligence, Robotics and Trasportation lab under Dr Tsz-Chiu Au. After my service in Republic of Korean Airforce, I continued my research career as graduate researcher in Computer Science.
My research interests include: Multirobot System, Autonomous Driving, Vehicle Motion Planning and Real-Time Perception.
Below are projects I participated during my research career.
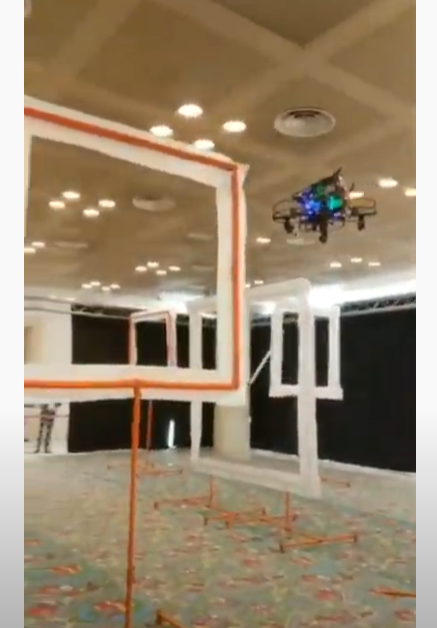
First Author Research - Multiagent Aerial Systems Feb 2023 - May 2024
Implementation of original makespan-optimized motion planning algorithm considering inter-swarm aerodynamic interference for fast-paced drone light shows
Implementation of collision avoidance algorithms on the crazyflie platform including Artificial Potential Field (APF), Buffered Voronoi Cell (BVC), and Stop and Go algorithm
Wind Field Modeling for Formation Planning in Multi-Drone Systems, ICRA 2024
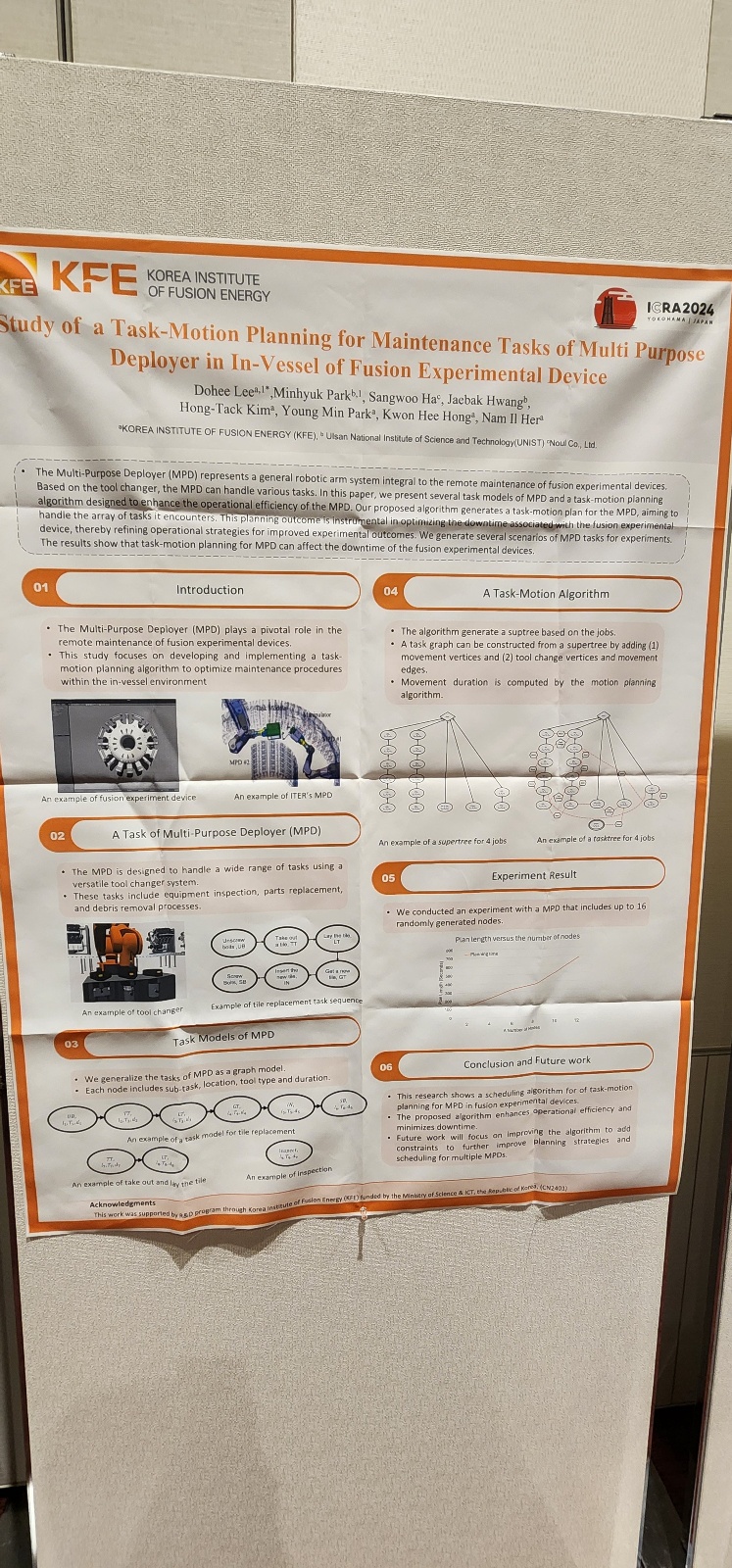
Research: Lead Programmer - Robotic Arm for Nuclear Environment Nov 2023 - May 2024
Blender 3D modeling, Moveit library and Gazebo implementation, and original motion planning algorithm for a virtual robotic arm based on specifications of a real Nuclear Reactor.
Motion Planning Algorithm of An Articulated Robotic Arm for Inspecting Double Null Divertor in Fusion Experimental Device, ICRA 2024 Workshop Robotics for Nuclear Environments
Lead Programmer - Service Robot Development Feb 2023 - Nov 2023
UNIST AI Challengers Program: Time-optimal visual obstacle avoidance and planning for autonomous emergency drone delivery systems with electromagnetic actuators
Development of Airsim simulation environment and a physical prototype delivery drone with object detection neural network and mission guidance neural network
Project Leader - Reinforcement learning-based Delivery drone Feb 2023 - Nov 2023
UNIST AI Challengers Program: Time-optimal visual obstacle avoidance and planning for autonomous emergency drone delivery systems with electromagnetic actuators
Development of Airsim simulation environment and a physical prototype delivery drone with object detection neural network and mission guidance neural network
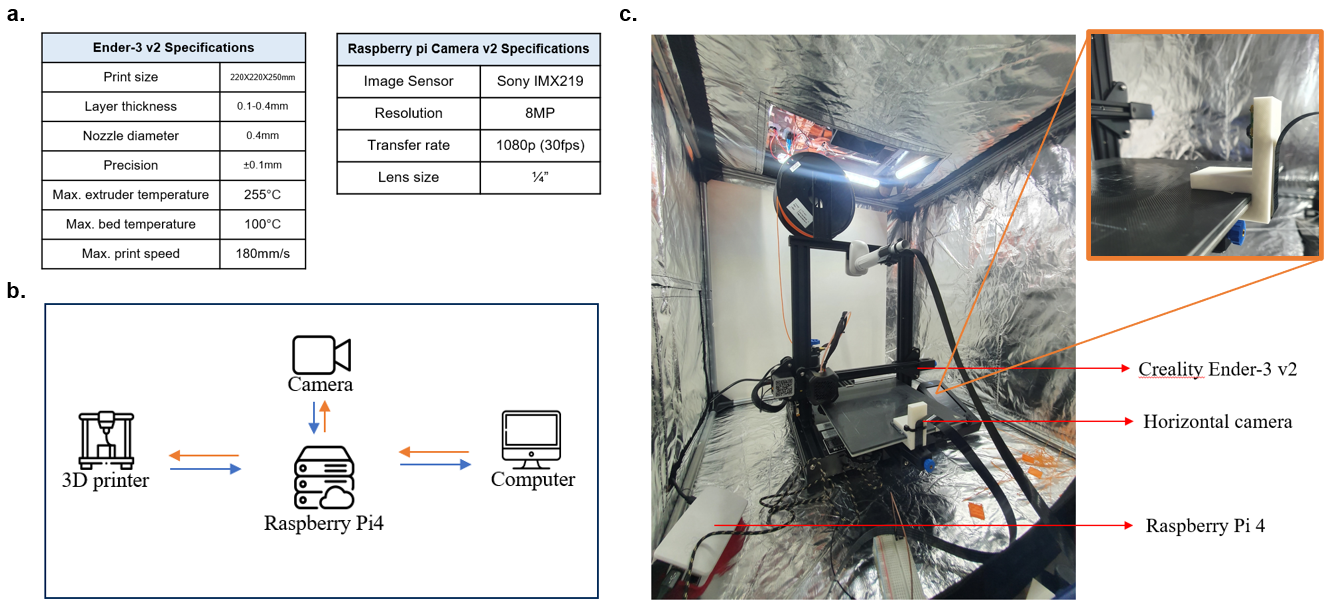
Project Leader - Smart 3D Printer Farm Development Feb 2022 - Nov 2022
UNIST AI Challengers Program: Generative AI (Variational AutoEncoder) and object detection (Darknet YOLO) for automated 3d printer diagnostics
PATENT: Automated quality verification of FDM 3D printing output using image data and establishment of image data collection environment, 2023 (South Korea)
Project Leader - Survey Drone Development Feb 2021 - Nov 2021
UNIST AI Challengers Program: Outdoor and indoor survey drone hardware development along with custom-trained Darknet You Only Look Once for long-range object detection
5th place, DNA+ Outdoors Autonomous Drone Survey Flight Competition Sep 2021
Team Leader - Autonomous Drone Racing Feb 2017- Nov 2018
Leading UNIST Dronebot team in IROS autonomous drone racing Constructing custom drone (3D print),
Designing Computer-Aided Control system based on ROS and hardware setup (Optitrack, ZED stereo camera, and Jetson TX2) Challenges and implemented technologies used in autonomous drone racing.
Intel Serv Robotics 12, 137–148 (2019)
Invited Talks
“Challenges in Using Drone Swarms as Video Game Platforms” in Workshop on Human-Multi Agent Interaction, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Detroit 2023
Publications
Minhyuk Park, Tsz-Chiu Au, Wind Field Modeling for Formation Planning in Multi-Drone Systems IEEE International Conference on Robotics and Automation (ICRA) Yokohama 2024
Minhyuk Park, Tsz-Chiu Au, Challenges in Using Drone Swarms as Video Game Platforms, Workshop on Human-Multi Agent Interaction, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Detroit 2023
Moon, H., Martinez-Carranza, J. et al. Challenges and implemented technologies used in autonomous drone racing. Intel Serv Robotics 12, 137–148 (2019)
Research Posters
Minhyuk Parka, Jaebak Hwanga, Hong-Tack Kimb, Young Min Parkb, Kwon Hee Hongb, Nam Il Herb, Dohee Leeb*,Motion Planning Algorithm of An Articulated Robotic Arm for Inspecting Double Null Divertor in Fusion Experimental Device , 2024 IEEE International Conference on Robotics and Automation (ICRA) Workshop Robotics for Nuclear Environments
Dohee Leea,1*, Minhyuk Parkb,1, Sangwoo Hac, Jaebak Hwangb, Hong-Tack Kima, Young Min Parka, Kwon Hee Honga, Nam Il HeraStudy of a Task-Motion Planning for Maintenance Tasks of Multi Purpose Deployer in In-Vessel of Fusion Experimental Device, 2024 IEEE International Conference on Robotics and Automation (ICRA) Workshop Robotics for Nuclear Environments